
Ничего не куплено!
Категории Статей
Популярные Статьи
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и
любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что
позволяет использовать их в критичных, например, индустриальных применениях. По сравнению с
обычными двигателями постоянного тока, шаговые двигатели требуют значительно более
сложных схем управления, которые должны выполнять все коммутации обмоток при работе
двигателя. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где
точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное
преимущество. Справедливости ради следует отметить, что в последнее время для управления
коллекторными двигателями все чаще применяют контроллеры, которые по сложности
практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное
позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как
такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для
систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же
время системы с обратной связью способны работать с большими ускорениями и даже при
переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то
информация о положении ротора теряется и система требует базирования с помощью, например,
концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного
недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и
шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление
скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый
двигатель является наиболее экономичным решением. Как и для обычных двигателей, для
повышения момента может быть использован понижающий редуктор. Однако для шаговых
двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент
растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К
тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с
коллекторными двигателями, что ограничивает максимальное передаточное число и,
соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с
редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим
применение редуктора, является присущий ему люфт.
Возможность получения низкой частоты вращения часто является причиной того, что
разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели
неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную
мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным
редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому
же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных
двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о
хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике,
автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно
сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера
применения, где они незаменимы.
Существуют три основных типа шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с
постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению,
двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным
магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим
усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от
них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с
переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним
общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые
обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными
магнитами имеют 4 раздельных обмотки.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора,
которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из
материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно
определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано.
Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы
собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент
пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству
витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка
шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в
этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения,
называемого моментом удержания. После этого ротор повернется и будет стараться принять одно
из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления
магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется
мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель
имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан
отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым
переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер
должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется
другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть
объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов
Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно
называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего
выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно
использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и
отводами тоже можно использовать в биполярном режиме, если отводы оставить
неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить
максимальной рассеиваемой мощности.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более
высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают
больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов - униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать центральный отвод. Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения - биполярное. Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в ?2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / ?2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в ?2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в ?2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
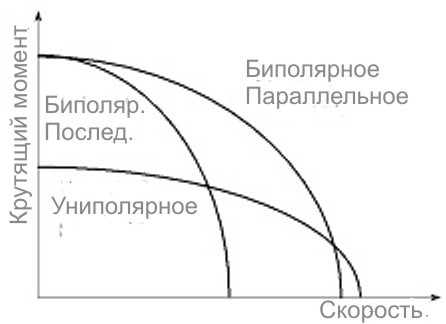
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов - униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в ?2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / ?2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в ?2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в ?2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в ?2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток - 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /?2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в ?2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в ?2 раз.
Отзывов: 0
Ваше Имя:
Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке:

Ваш отзыв: Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке:
Последние Статьи
Управляющая программа состоит из последовательности кадров и обычно начинается с символа начало прог ...»
12.01.2015 Просмотров: 3121
Bmp2Cnc – для создания G-кода рельефа из растрового рисунка.
BMP2Cnc - недорогой, доступ ...»
12.01.2015 Просмотров: 3184
Что такое постпроцессор?
Постпроцессор - это программный модуль, предназначенный для преобра ...»
12.01.2015 Просмотров: 2605
Последние отзывы